
|
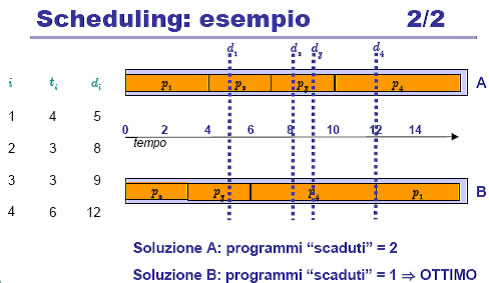
La tecnica greedy č spesso utile per risolvere problemi di scheduling, in cui si hanno dei programmi da eseguire su un processore e si vuole trovare l’ ordine di esecuzione ottimo in base ad un prefisso criterio. Immaginiamo un problema di scheduling del seguente tipo. Dati n programmi p,…,pn tali che ciascun pi richiede ti unitŕ di tempo per la sua esecuzione e deve essere completato entro una certa scadenza di, trovare un ordine S in cui eseguire tutti i programmi in modo da minimizzare il numero di programmi per i quali la scadenza non č rispettata. Il problema puň essere risolto con un algoritmo di tipo greedy ideato da Moore nel 1968. I programmi sono ordinati in una sequenza S per scadenze crescenti.
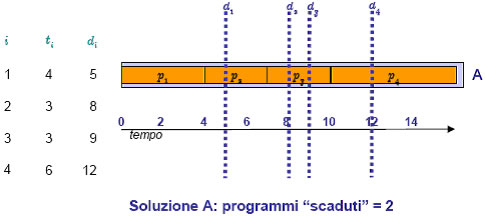
Si scorre la lista per identificare il primo programma p’ in ritardo; si elimina il programma p” piů lungo che precede p’. Si itera il procedimento fino ad ottenere una sequenza S priva di programmi in ritardo. La sequenza S ottima č ottenuta aggiungendo, in un ordine qualsiasi, i programmi precedentemente eliminati.
Una realizazione poco accorta dell’ algoritmo porta ad una complessitŕ di O(n2). Infatti si possono calcolare, per tutti i programmi p della sequenza S, gli istanti in cui terminano la loro esecuzione. Tali istanti sono dati dalla somma dei tempi di esecuzione di p e dei programmi che lo precedono.

Tale calcolo richiede O(n) tempo per tutti i programmi. Confrontando poi gli istanti di terminazione dei programmi con le rispettive scadenze, si puň determinare il primo programma p in ritardo e quindi eliminare il programma p piů lungo. Anche questa fase richiede O(n) tempo.
Poiché il procedimento di eliminazione di un programma si potrebbe iterare per O(n) volte, la complessitŕ risulterebbe appunto O(n
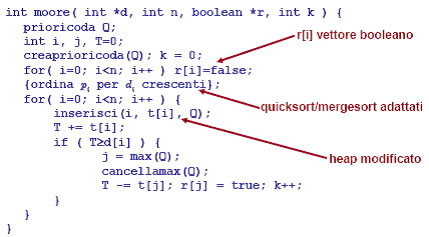
Questa funzione utilizza due vettori d[1….n] e t[1….n ] per le scadenze ed i tempi di esecuzione degli n programmi. Utilizza poi un vettore bollano r [1…n] tale che ri = true solo se il programma i č in ritardo. Viene poi utilizzata una variabile intera T per calcolare la somma dei tempi di esecuzione dei programmi inseriti in Q. Quando T >= d[i] allora il programma i č in ritardo, e viene estratto da Q, il programma j con tempo di esecuzione massima max(Q), sottraendo poi tj da T, incrementando K, e impostando r[j] a true. Al termine dell’ esecuzione la variabile k contiene il numero dei programmi in ritardo, mentre il vettore r specifica quali programmi sono o non sono in ritardo. La sequenza ottima č ottenuta eseguendo dapprima i programmi con r[j] = false in oridne di indici cresecenti, e poi gli altri in un ordine qualsiasi. L’ordinamento iniziale costa O(n log n ). Il ciclo for č ripetuto n volte e ogni iterazione del ciclo costa O( log n ) sia per l’inserimento in Q che per cancellamax e max. Inoltre la sequenza ottima S* puň essere ottenuta in O(n) tramite una scansione . Pertanto la complessitŕ dell’ algoritmo di Moore č (n log n).
Tutto quanto riportato in questa pagina č a puro scopo informativo personale. Se non ti trovi in accordo con quanto riportato nella pagina, vuoi fare delle precisazioni, vuoi fare delle aggiunte o hai delle proposte e dei consigli da dare, puoi farlo mandando un email. Ogni indicazione č fondamentale per la continua crescita del sito.